Defense
Based on the state-of-the-art technology, the best solution required by the armed forces
in the areas of surveillance patrol, command, control, and communication, and pinpoint strike.
- 현재 페이지경로
Naval Systems
The state-of-the-art marine system is implemented with the unique technology.
Hanwha Systems is only the company having achieved the force integration of 80 or more ships for 40 or more years and being specialized in developing the combat system in the nation.Hanwha Systems will lead the advancement of the navy with the combatability improvement and the advanced technology through the management of each technology generation and through the evolutionary combat system development.
The unattended maritime system of Hanwha Systems can enter into the military and civil complex missions such as the coastal and underwater monitoring and search and the marine environment survey by applying the leading edge 4th industrial revolution technology such as autonomous navigation and obstacle evasion. Hanwha Systems will actively support the unattended system operation of our navy through the perfect product lineup of the floating and underwater and small and large unattended systems.
Marine Unmanned System
-
AUV (Autonomous Underwater Vehicle) for the Underwater Search
- AUV (Autonomous Underwater Vehicle) for the Underwater Search

- The AUV (Autonomous Underwater Vehicle) for the Underwater Search) is the maritime unattended system searching the mine buried in the coast and the seabed through the autonomous navigation. The AUV (Autonomous Underwater Vehicle) autonomously performs the mission along the pre-inputted path. It has the optical camera, the side scan sonar, and the ultrasonic wave camera enabling the correct detection and identification of the underwater object in the national coast having the high turbidity.
The AUV (Autonomous Underwater Vehicle) passed the test evaluation managed by the navy through the test on the operation in the deep sea for the first time of the local AUVs (Autonomous Underwater Vehicles) and will be utilized in the battle as the navy weapon system through the further system development.
-
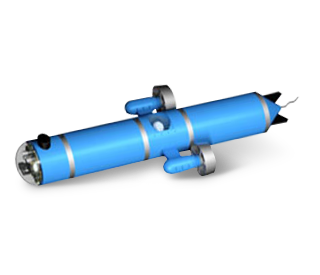
Autonomous Underwater Vehicle for Docking (DAUV)
- Autonomous Underwater Vehicle for Docking (DAUV)
- The actual product of the Autonomous Underwater Vehicle for Docking (DAUV) is the submarine prepared for the demonstration in the Naval Academy peninsula. It is the unattended system possessing the function of returning the unattended submarine coming near the mothership after performing the mission after the launch from the surface or underwater ship. The various sensors for the precision guidance algorithm and docking are mounted for the fast terminal guidance. Hanwha Systems is developing the unattended submarine for docking with the civil and military technologies, and the technologies secured from it will be applied to all actual unattended submarine collection systems.
-
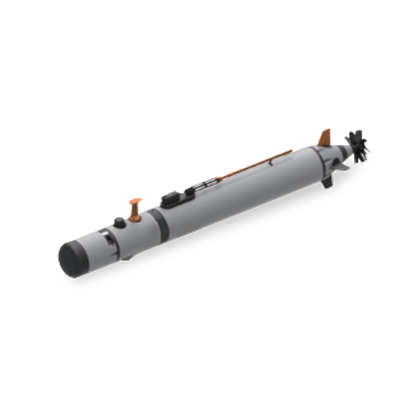
Autonomous Underwater Vehicle for the Deep Sea (ISiMI6000)
- Autonomous Underwater Vehicle for the Deep Sea (ISiMI6000)

- The autonomous underwater vehicle for the deep sea (ISiMI6000) is the large marine unmanned system for the deep sea search and the marine environment survey. It is designed as the open hull structure. Hanwha Systems is developing the prototype of the unmanned submarine for antisubmarine surveillance with the Agency for Defense Development by using the technology obtained from the development of ISiMi6000.
-
Consumable Mine Disposal Remotely Operated Vehicle (ROV)
- Consumable Mine Disposal Remotely Operated Vehicle(ROV)
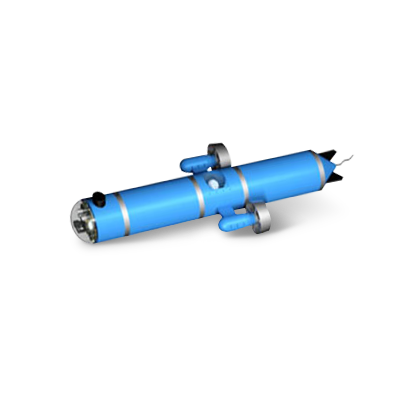
- The mine disposal Remotely Operated Vehicle (ROV) is the maritime unmanned system promptly exploding and removing the detected mine. It is designed to complete mission without being floated with the unique strong current of the Korean peninsula coast. The shaped charge warhead is mounted so that the mine is removed effectively regardless of the mine burial position or type. The mine disposal Remotely Operated Vehicle (ROV) of Hanwha Systems verified its technology and performance through the various actual experiments. It is expected that it will contribute to the navy’s mine sweeping mission later.
-
Unmanned Surface Vehicle (USV) for Complex Missions
- Unmanned Surface Vehicle (USV) for Complex Missions
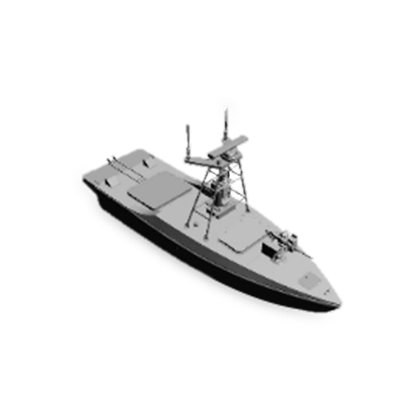
- The Unmanned Surface Vehicle (USV) for complex missions performs the missions of doing the surface monitoring and surveillance and the underwater dangerous object search from the threatening force possibly penetrating the national coast. It has the advantages of designing the hull and mounting the mission equipment to perform the mission anytime day and night. Hanwha Systems applied the optimal hull and the promotion design technology to the Unmanned Surface Vehicle (USV) for complex missions for securing controllability and seaworthiness in case of the high speed navigation. It was designed to autonomously avoid the forward obstacle by applying the collision avoidance technology based on the International Regulations for Preventing Collisions at Sea (COLREG). It will be used in the actual battle as the navy weapon system through the future system development.