Autonomous Underwater
Vehicle for Underwater
Surveillance (AUV)
Defense
Unmanned
Maritime System
- 현재 페이지경로
Unmanned Maritime System
UMS(Unmanned Maritime System) is a weapons system equipped with high-tech ISR devices to do surveillance and tracking of intruding surface targets or underwater sea mines or submarines.
Hanwha Systems is developing USV(Unmanned Surface Vehicle) and UUV(Unmanned Underwater Vehicle), which can perform surface ISR and underwater search missions, respectively. The scope of UMS is being expanding from ISR missions to combat missions to include combined operations of manned and unmanned systems. In addition, UMS operation is shifting from the individual operation to the swarm operation. In this regard, our development goal is to further enhance our naval combat system so that it can provide an integrated management of UMS.
- Features
-
-
Autonomous navigation obstacle
avoidance swarming control
technology -
Manned-Unmanned Systems
combined operation technology -
Standard architecture based
development technology
-
Autonomous navigation obstacle
UMS Operation Concept
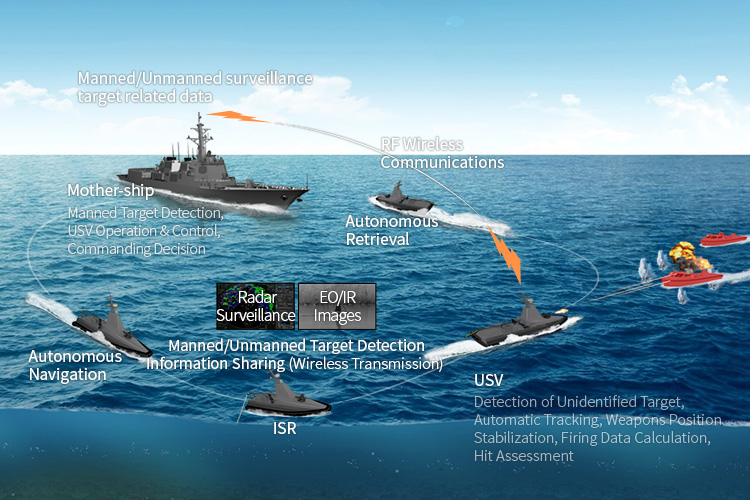
Surface Surveillance and Reconnaissance
- UMS is launched, and when an unidentified surface target approaches, UMS identifies the target.
- Automatic target tracking and data transmission. Conduct engagement mission following the engagement order from mother-ship
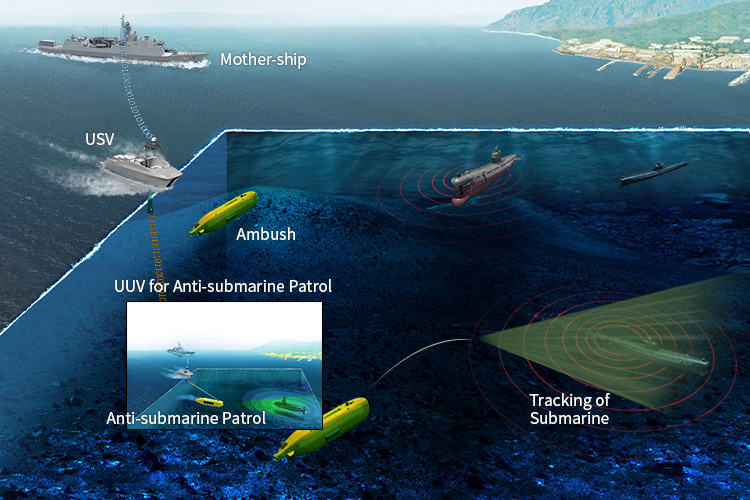
Anti-Submarine Operation
- Ambush or anti-submarine patrol to detect enemy submarine
- Collaboration between USV and UUV to track submarine, collect information and disseminate the situation awareness
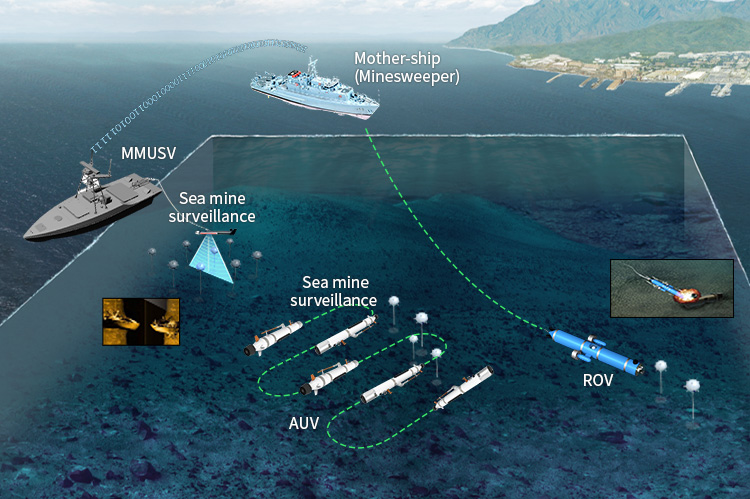
Mine Countermeasures Operation
- USV or UUV-mounted sonar to detect, identify and locate sea mines
- Guide ROV(Mine Hunter) to the mine, do the final confirm of the mine and eliminate the mine by detonating embedded warhead
VIDEO
-
- AURA
- AURA, an Unmanned Surface Vehicle developed by Hanwha Systems thru the self-funded investments. Thanks to AURA, Hanwha Systems’ unmanned vehicle design capabilities and autonomous navigation technologies are widely recognized.
-
- MMUSV
- MMUSV applies the optimum hull, propulsion design technologies to secure seaworthiness and controls at the time of high speed sailing. Also, COLREGs-based collision avoidance technology is utilized to avoid forward obstacle autonomously.
PRODUCTS
-
AUV
(Autonomous Underwater Vehicle for Underwater Surveillance) AUV is an unmanned underwater vehicle that navigates autonomously by following the preset paths in order to survey mines deployed along coastal area or on seafloor. The sensors mounted onto AUV include optic camera, sidescan sonar, ultrasonic camera, etc., which enable clear detection and identification of underwater objects in the murky sea surrounding the Korean Peninsula.Read more
AUV is an unmanned underwater vehicle that navigates autonomously by following the preset paths in order to survey mines deployed along coastal area or on seafloor. The sensors mounted onto AUV include optic camera, sidescan sonar, ultrasonic camera, etc., which enable clear detection and identification of underwater objects in the murky sea surrounding the Korean Peninsula.Read more
Hanwha Systems’ AUV is the first AUV that passed the official test and evaluation conducted by ROK Navy, which included actual sea navigation test. In the future, when its full system development is completed, AUV will be deployed to the field as one of ROK Navy’s core weapons systems. -
Anti-Submarine Water
Read more
Unmanned
Underwater
Vehicle (ASWUUV)ASWUUV
(Anti-Submarine Water Unmanned
Underwater Vehicle)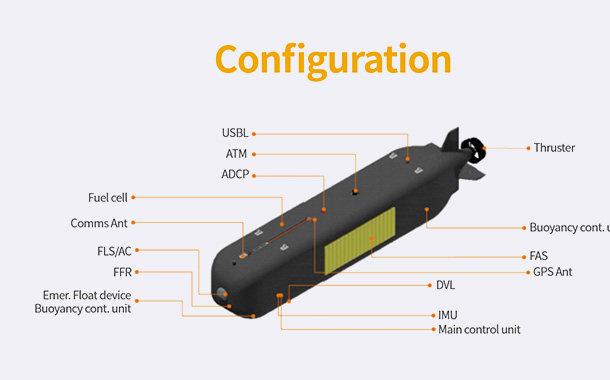 ASWUUV is a large scale UUV currently in our R&D pipeline. It is designed with an open architecture platform.
ASWUUV is a large scale UUV currently in our R&D pipeline. It is designed with an open architecture platform.
It will be capable of maintaining the underwater operation for a long duration and surveying enemy submarines or ships so as to safeguard the survivability of manned combat ships and to perform effective anti-submarine ISR activities. Its open structure platform allows for a free adjustment of operation depth, which minimizes shadow area. Therefore, it will bring a great advantage in collecting surveillance and reconnaissance information on the enemy’s underwater threats. By doing so, it will also expand mothership’s scope of operation and strengthen combat capabilities. -
Docking Autonomous
Read more
Underwater Vehicle
(DAUV)DAUV
(Docking Autonomous Underwater Vehicle)- This Project was performed based on ADD’s funding to promote military-civilian technology cooperation.
When UUVs, after being launched from surface ship or submarine, returns to an area adjacent the mothership, DAUV helps such UUVs to return to docking stations. In order to make speedy guidance, this system is equipped with precision guidance algorithm and various sensors required for the docking.
We are developing DAUV as military-civilian dual purpose technology and all the technologies secured from R&D activities will be applied to launch and retrieval systems of all UUVS. -
Remotely Operated
Read more
Underwater Vehicle
(ROV)ROV
(Remotely Operated Underwater Vehicle) Unmanned underwater vehicle that approaches and detonates sea mines detected, thus quickly removing them.
Unmanned underwater vehicle that approaches and detonates sea mines detected, thus quickly removing them.
This vehicle is designed to withstand strong tidal currents at the near seas surrounding the Korean Peninsula. It is also equipped with shaped charges that can remove sea mines effectively. Therefore, regardless of deployed sea mine locations or their types, ROV can remove them effectively. As Hanwha Systems will further enhance ROV’s operability, ROK Navy’s sea mine sweeping capabilities will improve greatly. -
Multi-Mission Unmanned
Read more
Surface Vehicle
(MMUSV)MMUSV
(Multi-Mission Unmanned Surface Vehicle)Unmanned surface vehicle which performs surface surveillance and reconnaissance missions to identify threats at the coastal seas surrounding the Korean Peninsula as well as to probe any dangerous objects in the water. With various mission devices mounted, this unmanned surface vehicle is capable of conducting multiple missions under all-weather conditions for 24 hours a day. For Hanwha Systems’ MMSUV, optimum hull and propulsion design technologies are used to secure navigability and seaworthiness even at the time of fast sailing. Also, as collision avoidance technologies are utilized for the design of this vehicle in accordance with COLREG(International Regulations for Preventing Collisions at Sea), it can avoid any frontal obstacle.- Key Features
-
- Unmanned system applying open architecture
- Learning based path planning function
- In-built, COLREG-based autonomous obstacle avoidance function
- Alternative navigation methods in the case of GPS disruption
-
Open Architecture Based
Read more
Unmanned Surface
Vehicle (AURA)AURA
(Open Architecture Based Unmanned
Surface Vehicle)Open architecture based testbed developed for standardization and operation of unmanned marine system. With this vehicle, common architecture for unmanned systems development and main autonomous mission modules can be implemented and verified. Key technologies that have been implemented and verified by using AURA include COLREF based collision avoidance, learning based route planning, learning based image target autonomous recognition, etc. Unmanned Surface Vehicle utilizing these technologies will perform surveillance, reconnaissance and search missions against security threats along the coast of the Korean Peninsula. -
Unmanned Surface
Read more
Vehicle (USV)USV
(Unmanned Surface Vehicle) Performs surveillance and reconnaissance mission for 24 hours a day in the sea near to the enemy territory. Capable of quickly responding to any infiltration by multiple number of the enemy forces on the sea as well as detecting and tracking underwater infiltration. In addition, by operating multiple number of unmanned mine sweepers simultaneously, this system can support effective and quick mine seeping operations, which is needed to secure safe sea routes to the main harbors. When the development of SUSV is complete, it will significantly strengthen ROK Navy’s combat capabilities with respect to surveillance, reconnaissance and mine sweeping operation.
Performs surveillance and reconnaissance mission for 24 hours a day in the sea near to the enemy territory. Capable of quickly responding to any infiltration by multiple number of the enemy forces on the sea as well as detecting and tracking underwater infiltration. In addition, by operating multiple number of unmanned mine sweepers simultaneously, this system can support effective and quick mine seeping operations, which is needed to secure safe sea routes to the main harbors. When the development of SUSV is complete, it will significantly strengthen ROK Navy’s combat capabilities with respect to surveillance, reconnaissance and mine sweeping operation.